Towards a Symbiotic Human-Machine Depth Sensor: Exploring 3D Gaze for Object Reconstruction
Teresa Hirzle, Jan Gugenheimer, Florian Geiselhart, Andreas Bulling, Enrico Rukzio
Adj. Proc. ACM Symposium on User Interface Software and Technology (UIST), pp. 114-116, 2018.
Abstract
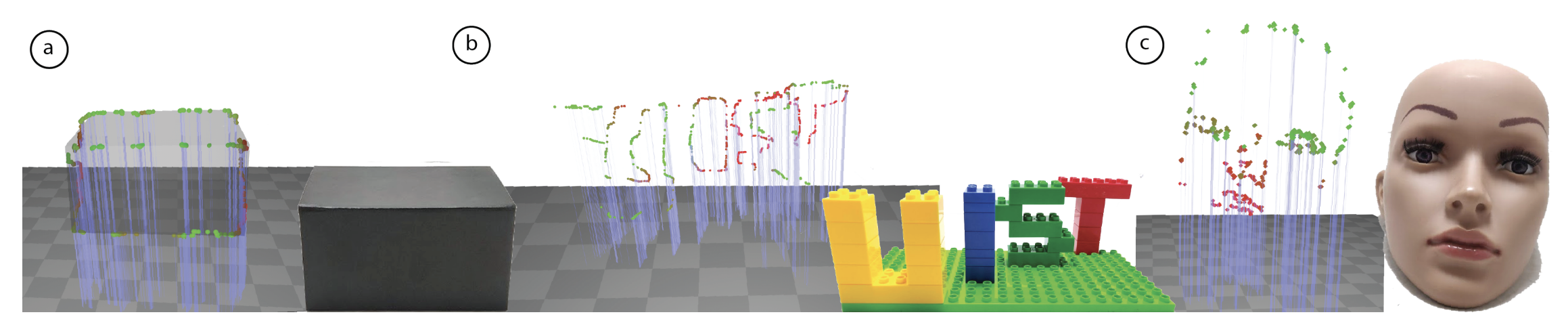
Eye tracking is expected to become an integral part of future augmented reality (AR) head-mounted displays (HMDs) given that it can easily be integrated into existing hardware and provides a versatile interaction modality. To augment objects in the real world, AR HMDs require a three-dimensional understanding of the scene, which is currently solved using depth cameras. In this work we aim to explore how 3D gaze data can be used to enhance scene understanding for AR HMDs by envisioning a symbiotic human-machine depth camera, fusing depth data with 3D gaze information. We present a first proof of concept, exploring to what extend we are able to recognise what a user is looking at by plotting 3D gaze data. To measure 3D gaze, we implemented a vergence-based algorithm and built an eye tracking setup consisting of a Pupil Labs headset and an OptiTrack motion capture system, allowing us to measure 3D gaze inside a 50x50x50 cm volume. We show first 3D gaze plots of "gazed-at" objects and describe our vision of a symbiotic human-machine depth camera that combines a depth camera and human 3D gaze information.Links
Paper: hirzle18_uist.pdf
BibTeX
@inproceedings{hirzle18_uist,
title = {Towards a Symbiotic Human-Machine Depth Sensor: Exploring 3D Gaze for Object Reconstruction},
author = {Hirzle, Teresa and Gugenheimer, Jan and Geiselhart, Florian and Bulling, Andreas and Rukzio, Enrico},
year = {2018},
pages = {114-116},
doi = {10.1145/3266037.3266119},
booktitle = {Adj. Proc. ACM Symposium on User Interface Software and Technology (UIST)}
}